
注目の自動車ニュース
清水和夫が語る2019年「自動運転の現在地と未来」とは
-

《写真 Getty Imges》
-

《写真 CES》
-

《写真 CES》
-

《写真 CES》
-

《写真 Getty Imges》
-

《写真 Getty Imges》
-
《写真 Getty Imges》
-

《写真 Getty Imges》
-
《写真 CES》
-
《写真 CES》
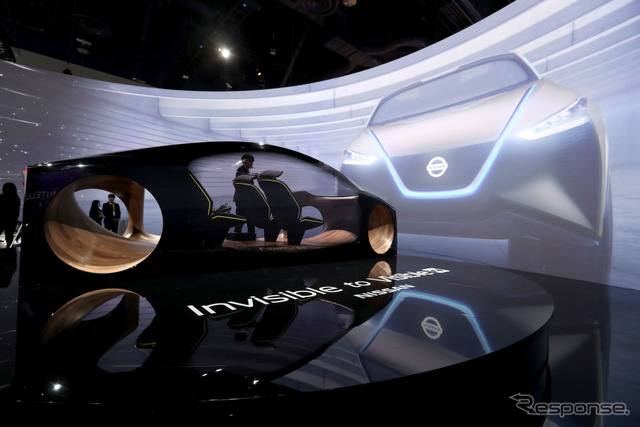
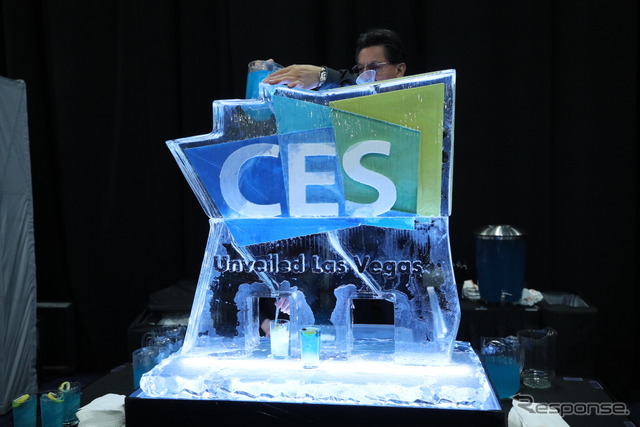
平成という年号も残りわずかだが、私の2019年は、昨年同様1月6日から開催されたラスベガスのCES(コンシューマー・エレクトロニクス・ショー)の取材からスタートした。自動運転からコネクト、さまざまなデジタル技術が発表、展示され、世界中の自動車関係者が熱心線を送るショーとなったが、やはり注目は自動運転関連だった。
すでに現実化に向けて自動車メーカーはいまできる範囲で実用化していくスタンスを採り、私はCESに参加し、あらためて、夢物語ではなくなってきた自動運転の具体的な第一幕が2020年~21年になるだろうと予想する。それを前提に、自動運転の現在地と未来、2019年のトピックをいくつか考えてみた。
◆ユーザーニーズとシステムの安全性能が整ってこそ
まずテック系の議論で忘れがちなのは、足元の技術や制度だ。自動運転といっても定義が曖昧で、よくいわれるレベル0~5はSAE(Society of Automotive Engineers/米国の自動車技術者協会)がレベル付けしたもので、クルマの価値を決めるものではない。
例えば、レベル5(完全運転自動化)は私の認識ではまだまだ非現実的であり、一切の条件をつけずに実現することは考えにくく、場所や速度をODD(運行設計条件)で規定して一般道をドライバーレスで走行するレベル4(高度運転自動化/限定条件下でシステムが運転タスクのすべてを実施)であっても、ODDの設定が難しく、ユーザーニーズとシステムの安全性能が整ってこそ可能となる世界だ。だからこそ、SAEのレベリングだけでなく、実際の交通のユースケースとユーザニーズ、さらにシステムの機能限界を見据えて「なにがしたいのか。どうできるのか」をしっかりと考えるべきだろう。自動運転への期待が高まるのは歓迎だが、実社会への導入に向けて、乗り越えなければならない壁は高いのが現実だ。
それでも2020年頃には自動運転と呼べる初期段階のシステムが、着実に投入されていくだろう。そのひとつがオーナーカーを対象にした高速道路上でのレベル3(条件付運転自動化/限定条件下でシステムがすべての運転タスクを実施するが、緊急時などシステムの要請でドライバーが運転操作を行う)技術の実用化である。
最初は渋滞時の低速域での走行が許され、自動車メーカーは2025年頃までには100km/h前後(130km/h前後を最高として)のレベル3に進化させたいと考えているようだが、技術的にいうと、この領域では約250m先の落ちたブロックを発見できるセンサー、レーザーレーダーのライダー(LiDAR=Light Detection and Ranging)の開発に加え、自車の正確な位置(誤差数センチ)を把握するために、詳細な地図(日本ではダイナミックマップと呼んでいる)が必要となる。さらにシステムの信頼性はもっと重要で、不良率が10のマイナス8乗というレベルが求められるという。コスト、信頼性、冗長性などがクリアされないと、やはり実用化は難しい。
◆法整備と交通シミュレーション
技術的なハードルを越えることは大前提だが、もういっぽうで法整備の問題がある。自動車を設計するには安全規準が必要で、日本と欧州は政府が許認可権を持ち、メーカーに型式認定を与える制度で運用し、規準策定は行政が握っている。とはいえ専門知識は自動車メーカー側にあるため、産官のチームワークが求められるわけだが、日本では内閣府主導のSIPが各省庁と業界を連携し、R&D中心の課題を研究している。
ドイツでは、ペガサスという産官学連携の国家プロジェクトが活発に動き、一定の成果を上げている。北米はというと、安全規準は連邦政府が定めているものの、規準に達成しているかどうかは自動車メーカーの自己認証制度で運用している。このように各国の安全規準と道交法上のルールを改定し、法整備を進めながら、実社会に普及させていくことも重要になる。
また、ロボットタクシーやバスのような商用車の場合、ドライバーレスで人件費がかからないため、オーナーカーよりも高価なライダーが使えるものの、社会実装するには都市交通やインフラとセットで開発する必要がある。いくら優秀なハードを提供しても、それだけでは安全性を担保できず、運用できないと私は感じている。都市部の交通をもっと快適に、安全にするには、クルマや人々の行動パターンをデータ収集して繋いで、クルマとリンクさせながら、全体を最適化しなければならない。そこで、今後話題を集めそうなイノベーションが量子コンピューターを使った交通シミュレーションだ。
◆2019年は自動運転の土台づくりに重要な1年に
デンソーはカナダのDWAVE社の量子コンピューターを使って、交通シミュレーションを研究し、本年中には東京工業大学中心にコンソーシアムが立ち上がる予定(https://qard.is.tohoku.ac.jp/2018072066/)である。フォルクスワーゲンもDWAVEと連携しており、VWグループのホールディング会社であるポルシェSEはドイツの交通シミュレーションのコンサルタント会社で知られるPTV(プラヌング・トランスポート・フェルケール)を買収。膨大なデータをシミュレーションするのに量子コンピューターが不可欠だと考えているようだ。
現状のカーナビ情報は個別の情報提供のため、常に最適ルートを検索してくれるが(なかには生活道路までガイドするナビもある)、同じ情報が共有されるゆえに、渋滞はなくならない。ところが、V2VやV2Iのように、クラウド経由でデーター収集すると、交通全体の最適化ができ、例えば「A車はルートa、B車はルートbを選びなさい」とガイドすることが可能となる。
PTVのシミュレーションでは、都市部でのクルマの台数、加えて渋滞とCO2を減らして、移動時間の短縮を、実現できることが確認されている。交通には全体を統合するシステムがマストであり、もはやそのレベルになると、スーパーコンピューターでは処理できなくなり、IOT、AI、クラウド、5Gを使ったMaaS(Mobility as a Service)には量子コンピューターが不可欠というシナリオをデンソーやVWは考えているようである。
レベル5の世界はまだ先だが、自動車技術だけでなく、社会インプレや法整備も同時進行で整えながら、実現に向けて着実にステップアップし、2019年はその足固めというか、土台づくりが行われていく重要な1年になりそうだ。
清水和夫|国際自動車ジャーナリスト
1977年武蔵工業大学電子通信工学卒
1981年からプロのレースドライバーに転向
1988年本格的なジャーナリスト活動開始
日本自動車ジャーナリスト協会会員(AJAJ)
日本科学技術ジャーナリスト会議 会員(JASTJ)
NHK出版「クルマ安全学」「水素燃料電池とはなにか」「ITSの思想」「ディーゼルは地球を救う」など
NEXCO東道路懇談委員・継続中
国土交通省車両安全対策委員・継続中
国家公安委員会速度取締り見なおし検討委員
内閣府SIP自動走行推進委員・継続中
経済産業省・国土交通省 自動走行ビジネス検討会委員
HFCV用容器検討委員会
協力 Start Your Engines(https://www.startyourengines.net/)






