
注目の自動車ニュース
羽田空港で自動運転バス…ジェットブラストとGPS遮断に対応、実証実験


















ANA(全日本空輸)やソフトバンク傘下のSBドライブ、愛知製鋼、先進モビリティ、NIPPO、NEC(日本電気)の6社は1月22日、羽田空港の制限区域内における、自動運転バスの実証実験の模様を報道関係者に公開した。実証実験期間は1月15~25日の11日間。
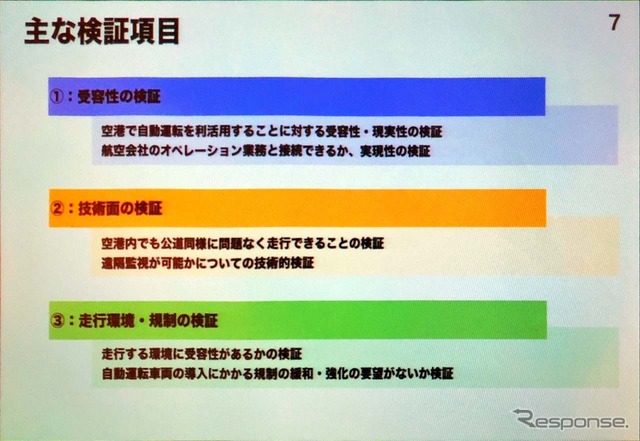
◆ターミナル本館とサテライトの自動運転走行を目指す
この実験は、これは国土交通省の航空イノベーション推進の一環として実施されているもので、2018年12月から全国4空港で、8グループに分けて実証実験を実施しているものの1つ。今回公開された実験では、GPSの電波が取得しにくくなる建物の中を走行しても安定した走行が継続できるよう、磁気マーカーによって走行位置を制御する仕組みを活用。2020年に開催される東京オリンピック・パラリンピックの開催で大幅な利用増が見込まれる2020年7月を目標に実用化を目指す。
実験では市販されている日野『ポンチョ』をベースに、先進モビリティの自動運転制御技術を盛り込んだ小型バスを使用する。ステアリング部には電動制御するためのモーターを取り付け、自動走行制御の状況確認やSBドライブが開発した「ディスパッチャー」からの情報を表示するディスプレイを運転席に設置。現在地測位用としては通常のGPSよりも高精度測位が可能となるRTK-GPSシステムも搭載されている。また、障害物検知用としてLiDAR(ライダー)は車両前方と後方に計2つ、ミリ波レーダーは前方のみに1つ取り付けられていた。
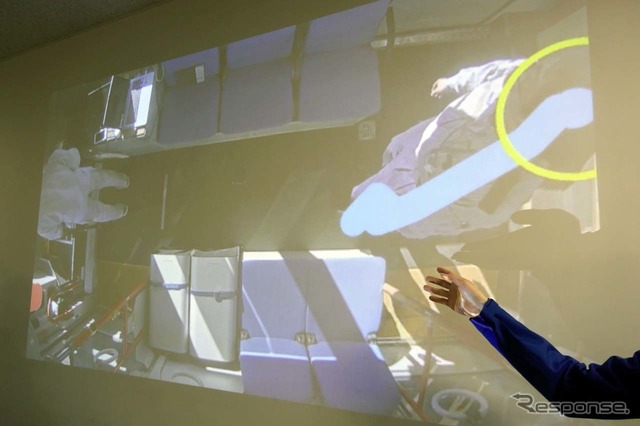
遠隔操作をするために車外に7個、車内に5個の計12個のカメラを装備し、この情報を元にディスパッチャーで遠隔監視する。このカメラは車外の障害物検知にも使用する他、車内カメラでは仮に車内にいる乗客が立ち上げって移動した場合、それを検知してアラートを発し、必要に応じて危険を放送で知らせることも可能だ。さらに今回の実験でポイントとなっている磁気マーカーによる制御用として、車体底部には磁気マーカーの時期を検知するRF-ID受信機(NEC製)と、磁気センサモジュール(愛知製鋼製)をセットアップ。これによって道路に埋め込まれている磁気マーカーを読み取って走行する。
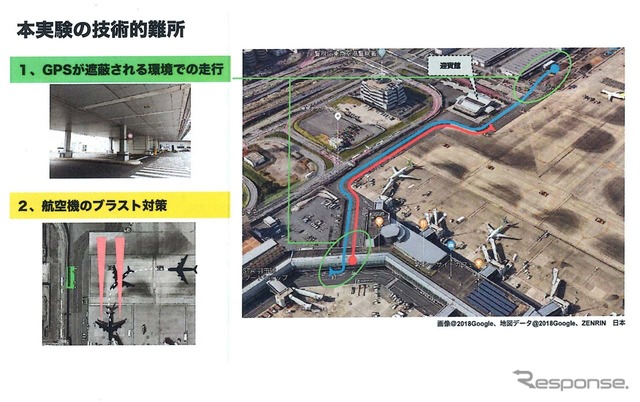
実証実験に使うルートは羽田空港第2ターミナル本館とサテライトターミナルを結ぶ片道約600mの区間。ここでは現在5分おきにリムジンバスが運行中で、制限速度が30km/hという比較的低速の環境下で、これを自動運転バスに置き換えられるかの検証が実験最大の目的だ。なお、実証実験のバスは最高速度20km/hに抑えて走行しているという。
◆空港特有の「GPSの遮断」と「ブラストの影響」への対応策がポイント
実験の場が空港の制限区域内となっていることで、実施に当たってはその特殊性を考慮した形で二つのの対応策が採られていた。
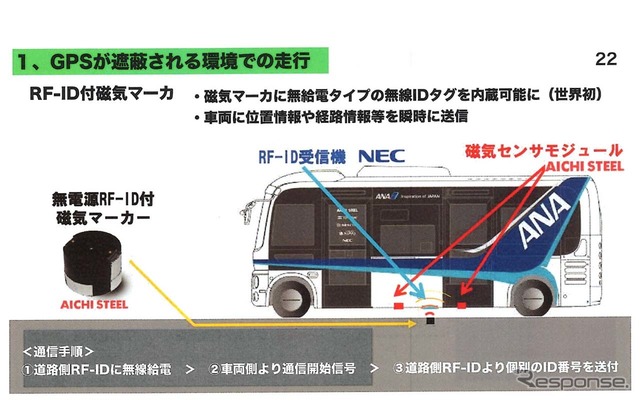
一つはGPSが遮断される環境下での対応だ。空港内を走行する場合では建物などの屋根下を走行する機会が多く、GPSが遮断されるケースが多くある。その対応策として白羽の矢が立ったのが磁気マーカーだ。
磁気マーカーを使ったシステムは、道路側に微弱な磁力を持つマーカーを埋め込んで、車両側のセンサーで読み取りながら走行する技術。磁気マーカーは直径3cmほどの大きさで、通常は2m間隔で、カーブなど精度が求められる場所では1m間隔で埋設。この実験では埋設をNIPPOが担当し、250mの区間に200個程度のマーカーが埋められた。
愛知製鋼によると、当初はより簡単に施工できるシートタイプの磁気マーカーも検討したが、空港内では万一にもトラブルの発生は避けなければならない。シートタイプでも十分な粘着性を備えているが、仮にそれが剥がれてエンジン内部に吸い込まれる事態も想定し、埋め込むタイプを採用したという。道路に埋設するコストはあるものの、磁気マーカーは積雪で白線が見えなくなるような天候も通信に対応できるなど、環境の変化に強いことを同社は強調する。
また、この磁気マーカーはRF-IDセンサーの機能を新たに含んでいるのも大きな特徴となっている。マーカーにはIDを埋め込むことで、それを識別することで個別の位置が特定できるのだ。しかも無電源で対応できるということで、自己位置推定技術の一つとして将来性は高いとされる。前述のシートタイプにもRF-ID付きのタイプを用意しており、愛知製鋼によれば2タイプのマーカーで普及を進めていく考えだ。
対応策の二つ目はエンジンのブラスト(ジェットエンジン後方の排気)に対する問題だ。空港の安全管理規定では飛行機の後端から100m以上離れることが定められており、空港内を走行するにはこの影響を踏まえることが必須となる。ディスパッチャーではこの影響を避ける指示を遠隔操作で出せるようになっていた。なお、ブラストに対する熱の検知は今回行っていない。
走行ルート上にはブラストが影響するエリアの前後に「ブラスト停止線」が引かれており、今回の実験車も必ず一旦停止するようプログラムが組まれている。ここで停止した実験車はディスパッチャーにいる監視者の指示を待って再発進するのだ。なお、SBドライブによれば車両とディスパッチャーの通信にはLTE回線を使用し、遅延は1秒未満とのこと。3秒程度通信が途切れた場合には車両が自動停止するという。
◆自動運転の実証実験は人がすぐに介入できるレベル3で実施
取材で取材陣は、自動走行しているバスには乗車せず、外部からその様子を見った。自動走行しているバスの様子をうかがうと、運転手はハンドル操作がいつでもできる態勢で手放ししていることがわかる。まさにレベル3での走行だ。カーブもスムーズにトレースしている様子で、停止線に近づくとゆっくりと自動停止。コースはクランクが連続していたこともあり、最高速を20km/hに抑えた走行でも他の車両の速度差はほとんど感じられなかった。
ただ、実証実験では自動運転走行が基本だが、ターミナル本館とサテライトそれぞれの折り返しでは運転手が手動で行った。ANAによれば「技術的には自動運転で対応できたが、Uターンする場所など一部ルート上で実験の申請ができなかったため」という。
今回の実験を受けて全日本空輸株式会社 空港センター業務推進部の山口忠克氏は、「2020年には外国から多くのお客様が来る。そのタイミングで日本の先進技術に触れていただく絶好の機会としたい」と抱負を述べた。その一方で、「(制限速度を20km/hとしたことで)キビキビと動いている車両との関係性をどう保つかが課題として浮かび上がっている」と、すでに課題が見出されていることを紹介。また、信頼性や確実性を重視する傾向が強い中で「一歩ずつ進めていき、自動運転を導入する意味合いについて認識してもらうきっかけにしたい」と話した。






