
注目の自動車ニュース
「行動推定」自動運転プラットフォームで産学連携、3輪バイクADIVAも…KEIO TECHNO-MALL
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《画像 ADIVA》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-
《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
-

《撮影 宮崎壮人》
慶應義塾大学理工学部による科学技術展「KEIO TECHNO-MALL 2018」が12月14日、東京国際フォーラムで開催された。産官学、文理融合の重要性を問うべく、またそのハブとなるべき大学の機能、研究を広く理解してもらうのがねらい。
ラウンドテーブルセッションには、自身も慶應OBというスバル中村知美社長も登壇し、自社の「アイサイト」を例に、基礎研究の重要性、製品開発の先にある価値を創造するためには外部との連携が必要であることなどを語った。
94もの分野に分けられたブースでは、マテリアル、バイオメディカル、エレクトロニクス、情報コミュニケーションなどさまざまな研究を展示。学生たちが中心となって、来場する企業関係者などに研究の内容やその魅力を語っていた。
◆「行動推定」による自動運転プラットフォーム
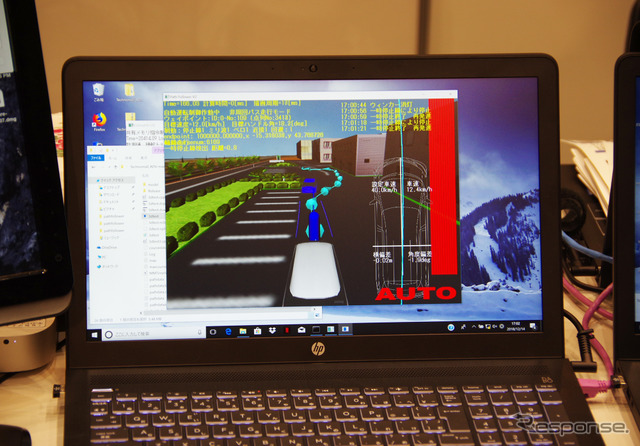
理工学部情報工学科の教授で、先端技術研究センター(KLL)所長の山中直明氏によるブースでは、「ネットワークアシスト型自動運転プラットフォーム」に関する実証実験の例が紹介されていた。走行する車両データや周辺環境のデータをエッジコンピュータで受け取り、解析。最適経路情報や自動運転車へのスムーズな走行指示をリアルタイムにおこなうというもの。これにより効率的な交通制御やサービス提供が可能になるという。
現在おこなわれているのは、敷地内でプログラミングされた自動運転車を走行させ、シチュエーションの変化を読み取り、別の自動車の自動走行に反映させるというもの。
山中氏は説明する。「行動推定と呼んでいます。他の人が走ったルート、行動から、自動的に学習して私の(自動運転車の)ルートを変えるというもの。私の進むルートであるという点が重要なんです。4時間前に駐車車両(障害)があったというデータは“今”の私には必要ないわけです。一方で、いつも午後4時くらいになると保育園のお迎えの車両が増える、ということもある。そういう情報をどこまでインテリジェントに処理できるか。得られるデータの99%は無意味なんです。車両にカメラがついていて障害を避ける、ということではなくて、前を走る車両のデータから行動を推定して私に変化を起こす。これは90%程度の精度で実現ができる」
実際に自動運転車を走行させた時の走行ラインの誤差は現在4cm~20cm程度だという。また現在はエッジコンピュータを至近距離に設置する形で実験しているが、リアルワールドでは200m~1km程度まではカバーできるようにしたいと話す。またデータ送受信の速度も重要だ。現在は10ミリ秒ほどの速度が確認できているという。
◆3輪バイクのADIVAとの産学連携
またこのブースでは、「移動を喜びにしたい」をスローガンに掲げるADIVAブランドの3輪バイクも展示されていた。ADIVAは山中氏の研究に賛同し実証実験に参画、3輪バイクを研究車両として提供している。今回の技術展の肝である産学連携の一例だ。
今回展示された車両自体は自動運転車ではないが、自動運転社会におけるデータ収集プラットフォームの一躍を担うものになるという。現在は、スマートフォンと連携したイグニッションのロック/解除、走行データの収集程度だが、今後は周辺車両から得られた行動推定データをスマートフォンのナビに表示させ、最適なルート案内を可能にするという。
さらにADIVAは今後、日本でも2019年3月に発売予定の3輪EV『AD-Cargo』を提供する予定。AD-Cargoではより詳細な走行データ収集が可能になるほか、3輪であることを活かし、無人運転でも倒れずに走行ができるようになるという。この機能は自動駐車や、無人でのピザ宅配サービスなどの実現に向け実験がおこなわれる予定だ。






