
注目の自動車ニュース
動物園ズーラシアのシャトルバスが自動運転中…I・TOP/相鉄バス/群馬大学の共同トライアル
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

写真提供:相鉄バスによる自動運転バス特別試乗会
-

写真提供:相鉄バスによる自動運転バス特別試乗会
-

写真提供:相鉄バスによる自動運転バス特別試乗会
-

写真提供:相鉄バスによる自動運転バス特別試乗会
-

写真提供:相鉄バスによる自動運転バス特別試乗会
-
《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
-

《撮影:中尾真二》
横浜市のI・TOP、相鉄バス、群馬大学は、大型バスによるレベル2自動運転の実証実験を9月半ばから1か月間、公道の営業運行区間において行う。大型バスの公道上の営業区間での自動運転は国内初となる。
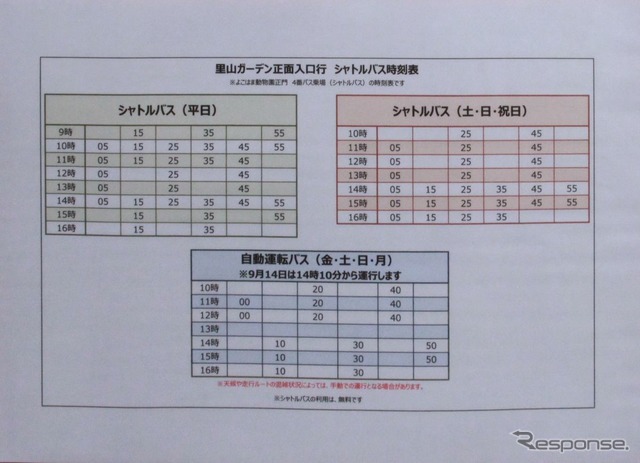
実験が行われる営業区間は、よこはま動物園ズーラシアと約1km先の里山ガーデン(自然公園)の間のシャトル運行バス。10時から16時の間に、10分から20分間隔で毎日運航されている便だ。このうち16便ほどが自動運転のバスとなる。実施期間は、里山ガーデンフェスタが開催される9月14日から10月14日までの間だ。
初日となる9月14日は、記者向けの発表会と関係者や地元保育園の園児と保護者が招待された出発セレモニーが行われた。
実証実験に利用されるバスは、日野自動車のブルーリボン。レベル2の自動運転なので、走行中もドライバーは運転席に着座するが、必要がなければ操作の介入はしない。設定走行速度は20km/h。シャトルバスのコースは、両園のバスロータリーをつなぐ900mほど。途中信号などはないが、バス停からのスタートと停止、ロータリー内での走行、ロータリーからの出入りなど、すべての行程が自動運転の範囲だ。
自動運転には、GNSSとLiDAR、レーザーセンサー、そして信号などを認識する360度カメラを使う。GNSS(GPS)は、固定の基準局を近くに設置し、車体の2つのGPSアンテナの情報と通信しながら、高精度の測位を行う。走行コースと周辺の道路状況を事前にスキャンしマッピングしておき、LiDARの走行情報をみながら車両を操作する。
レーザーセンサーは、フロント中央に取り付けられ、前方の障害物の有無と形状を認識する。GNSSのアンテナとLiDARはルーフに取り付けられる。事前の3Dスキャンデータと固定基準局を含むGNSSによる測位は、カメラによる画像解析ベースの自動運転システムというより、重機をプログラミング制御で自動運転させるi-Constructionのしくみに近い。
ミリ波レーダーを使わなかったのは、実験が20km/h走行と低速なため。障害物検知も形状認識ができるレーザーとしたという(群馬大学 次世代モビリティ社会実装研究センター 副センター長 小木津武樹 准教授)。周辺認識に360度カメラとLiDARを採用したのは、夜間や悪天候でも認識精度を確保するためだ。夜間・ハイコントラストなどの悪条件でも高解像度が確保できる高性能カメラと、高性能の画像処理モジュールは、量産しないとコストがむしろ高くなる(同前)。ワンオフか数台程度の実証実験車両には、LiDARとGPSの組み合わせが現実的という判断と思われる。
現実的という点では、車両側の制御部も同じコンセプトで実現されている。実験に使われているバス(日野自動車『ブルーリボン』)自体、渋滞追従型クルーズコントロールや車線維持のためのステアリング制御機能などの高度な自動運転支援機構が搭載されていない、いわば平均的な最近の路線バスだ。AMT(自動トランスミッション)は搭載されているが、パワステは標準的な制御で、渋滞追従ができる電動パーキングブレーキなどは付いていない。そのため、実験車両のステアリング操作は、ステアリングコラムにモーターユニットが行う。アクセルやブレーキ、AMTは、それぞれのECUへの制御介入とアクチュエーターで行う。
つまり、自動運転にかかわる装置は一般的な車両に後付けできる汎用システムといえる。高度な自動運転が可能でも、最先端機能を満載した次世代バスを購入する必要があるなら、過疎地や地方の交通課題の解決には使えない。既存システムに適用可能な技術というのは、実証実験を実験だけで終わらせないための重要なポイントともいえる。
車両の自動運転を解除する方法は、ドライバーがブレーキやハンドル操作の介入を行ったとき、コンソールとフロアのペダルに併設した解除ボタンの操作、そして、センサー類の情報から自動運転ができない・危険とシステムが判断したときとなる。
記者向けの試乗では、ロータリーで前にバスがつまっているとき、コース上で後続車が追い越しをかけてきたとき、バス停誘導員の指示などで、ドライバーがブレーキ操作などで自動運転を解除する場面もあったが、ロータリーから公道に出るときやロータリーでバス停まで移動するときも自動運転でこなせる場面もあった。
自動運転の性能や機能に関係ないが、試乗をしていて気になった点がひとつある。自動走行中、ドライバーは原則ハンドルには触らないのだが、ポーズとしてハンドルの下にずっと両手をひろげて待機している。緊急時の操作介入には合理的なスタンバイポーズともいえる。そういうポーズをしていないと乗客から「自動だからといってさぼっている。危険だ」などとクレームがくるのかもしれない。しかし、これは必要なのだろうか。
人の運転が前提となるレベル2の実験で、最初のフェーズではむしろ必要な措置だ。だが、せっかく省力化、効率化をめざす自動運転技術が、ドライバーの姿勢まで強制するようなシステムでは実用とはいえない。実験だからこそ、手の位置などフリーな状態でも問題ない方式を目指すべきだろう(無人運転を最初から目指すのでなければ)。自動運転と手動運転の安全な切り替えシーケンスとシステムについての研究は進んでいる。クレームを入れる乗客がいたら、それを含めた自動運転実験の主旨を説明すればいい。
これは、技術的な問題やバス会社の問題というより、我々乗客や自動運転カーのユーザーの意識、受容性の問題だろう。地域によっては路線バスのドライバー不足や無人バスの実現は切実な問題だ。この問題の解決には、我々も意識を変える必要があるだろう。






