
注目の自動車ニュース
ホンダが「協調型AI搭載マイクロモビリティ」の実証実験を開始、2030年の実用化をめざす
-

《写真提供 ホンダ》
-

《写真提供 ホンダ》
-

《写真撮影 会田肇》
-

《写真提供 ホンダ》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《ホンダHPより》
-

《写真撮影 会田肇》
-
《ホンダHPより》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《写真撮影 会田肇》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
-
《ホンダHPより》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
-

《写真撮影 会田肇》
本田技術研究所(ホンダ)は11月2日、独自のAIを活用して人とわかり合える技術「Honda CIマイクロモビリティ」を開発し、そのコアとなる技術を実装したマイクロモビリティを公開。その技術実証は茨城県常総市内に設けられたテーマパークや商業施設内で本年11月より順次開始される。
◆「地図レス協調運転技術」「意図理解・コミュニケーション技術」
この技術は、高精度地図に頼らずにカメラを使って周辺環境を認識しながら自律で自動走行できる「地図レス協調運転技術」と、さらに利用者の言葉や身振りを理解してモビリティの判断で提案できるコミュニケーション能力を備えた「意図理解・コミュニケーション技術」の2つで構成される。
「地図レス協調運転技術」は、高精度地図を使わずにカメラからの情報のみを使って、交差点やカーブなどの環境、歩行者や車両などを認識し、走行可能な領域をリアルタイムで理解して決定できる。公道だけでなく、区画線や縁石などがないオープンスペースにおいても人間の目と同じように空間認識・走行マップを高速で立体化できるのも大きな特徴だ。そして、認識された走行環境を踏まえ、モビリティが目的地までの行動計画を決定。リアルタイムのアルゴリズムによって、スムーズかつ安心な移動を実現する。
「意図理解・コミュニケーション技術」は、利用者とモビリティが相互に言葉などでキャッチボールすることで、双方が見えている共通点を伝え合うことで移動する位置を理解する技術。人間のように言葉や身振りを理解し、モビリティが自分で考えて提案することがポイントで、人と話すような自然なやりとりの中で移動する位置を理解し合うことができる。モビリティにはあらかじめルールやマナー、危険に対する経験値を登録しておき、たとえばネガティブな状況には自ら判断して利用者に避けるよう提案することも可能だ。
◆常総市では二つの施設で実証実験プロジェクトを展開
この技術の開発背景にあるのが、先進国を中心に少子高齢化が進み、アフターコロナを模索する社会にあって、人やモノなどが身近領域でマイクロモビリティ利用する機会が増えると予測されていることだ。しかし、これまでは自動走行とするには高精度地図の整備が欠かせなかったし、互いにコミュケーションを取るにはAIが多くを学習する必要があった。
そうした中で「Honda CIマイクロモビリティ」では、モビリティ自体に判断する能力を身につけさせ、利用者の意図を理解しながらコミュニケーションすることで、自動運転には欠かせないとされてきた高精度地図なしでも走行できる技術を開発したというわけだ。
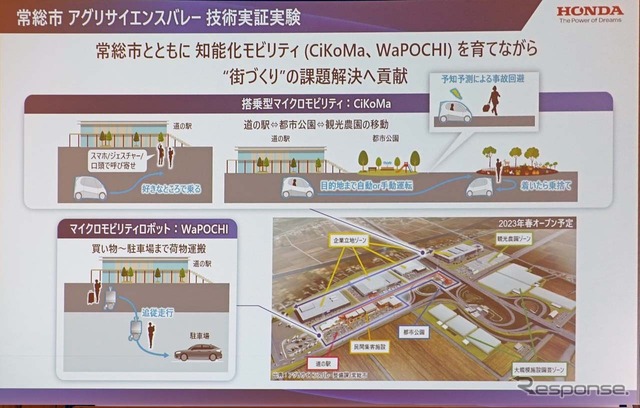
一方、常総市において展開する技術実証実験は、2022年11月から「水海道あすなろの里」で、搭乗型マイクロモビリティ「CiKoMa(サイコマ)」を走らせることで実施する。当初はドライバーが乗車する形での運転支援システムとしてスタートするが、徐々に地図レス協調運転技術を使った自動走行に移行していくとしている。
また、23年春頃からは同じ常総市内に建設中の「アグリサイエンスバレー」において、この「CiKoMa」に加え、歩く人に追従して荷物などを運ぶ「WaPOCHI(ワポチ)」を使った実証実験を予定する。ここでは地図レス協調運転技術だけでなく、意図理解・コミュニケーション技術による自動走行や利用者との自動追従を検証していく形で実証実験を進める。
◆「WaPOCHI」と「CiKoMa」をリアル体験した
この日は、利用者に追従する電動マイクロモビリティロボット「WaPOCHI」と、1人から数人までの乗車に対応した搭乗型の電動マイクロモビリティ「CiKoMa」を体験することもできた。
<電動マイクロモビリティロボット「WaPOCHI」>
「WaPOCHI」は、ペットのように寄り添って歩行での移動をサポートするロボットの意味を持つ。買い物や散歩をする時に利用者が手ぶらで歩けることを想定して開発された。飲み物やちょっとした小物を載せて、両手が開放された状態で歩けるほか、積載能力は最大30kgほどあるため、たとえば購入した米を載せて運ぶことも可能となる。
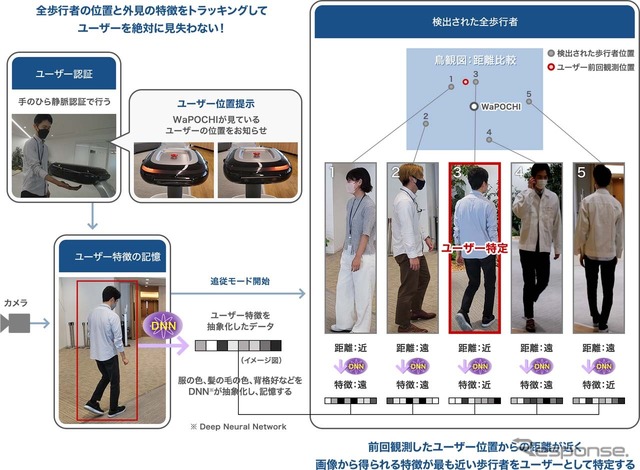
利用するにはあらかじめ会員登録した利用者が手のひらの静脈認証を行い、同時に上部に装備された複数のカメラが服装や髪形、背格好などを画像認識して記憶することから始める。登録を終えるとWaPOCHIは斜め後ろに付いて追従するが、この時は周辺の状況や歩行者の動きをAIが予測し、他の歩行者などを避けながらスムーズに走行することができる。今後はユーザーを先導してサポートする機能の実現も目指すという。
<電動マイクロモビリティ「CiKoMa」>
CiKoMaは必要なときに呼び出して、任意の場所で乗り捨てられる気軽な移動手段と位置付けられる。この日は、一人乗り用、二人乗り用、ゴルフカートをベースにした複数人が乗れるタイプの3種類が用意された。
このうち試乗して実際に走行できたのは二人乗り用のCiKoMaだ。前後に一人ずつ乗れる二人乗り用モビリティで、2016年までホンダが超小型モビリティ「MC-β」として実証実験に取り組んでいた車両を活用した。ここでは、地図レス協調運転技術を活用する体験をした。乗車すると中央にステアリングはあるものの、実際の操作は右側にあるジョイスティックを使って左右の進路を指示しながら走行する。
誤解がないようお伝えすると、このジョイスティックで車両をコントロールするのではない。走行は自動で行われるため、利用者が操作するのは進路を指示するだけだ。交差点に近づいたらジョイスティックを使って右か左かを指示し、指示がなければ直進する。左側にあるディスプレイ上では、指示に応じた進行方向の道路が生成されているのが把握できた。
次に体験したのが複数人が乗れるモビリティで、ここでは前方を捉えるカメラによって周辺にいる交通参加者を認識し、その行動予測や動きから潜在リスクを推定する仕組みが披露された。特に注目だったのがドライバーの顔の向きを赤外線カメラで捉え、顔の向きや視線などから対象を視認しているかどうかを判断できることだ。ここから生まれるリスクをシステムが判断でき、状態に応じた最適な警告をドライバーに発することを可能としている。
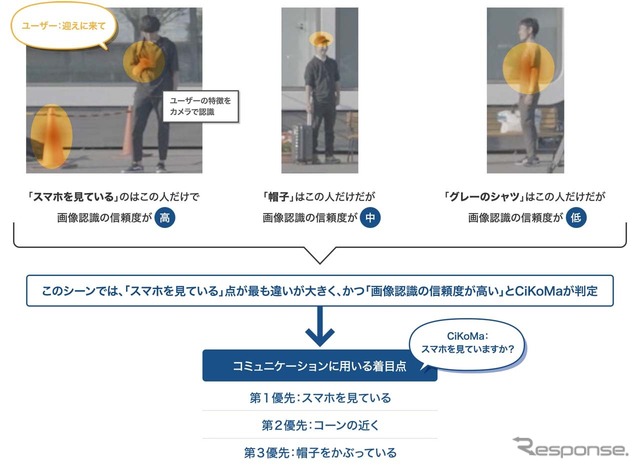
最後に披露されたのが一人乗り用モビリティで、利用者が「○○へ向かえに来て」とコマンドをスマホを介して呼ぶと、モビリティがそれに応えておおよその場所まで到着。そこでモビリティは周辺を見ながら利用者を探し「スマートフォンを見ているのがあなたですか?」と質問して、周囲にいる複数人から利用者を絞り込んでいく。ここでは画像認識した状況から絞り込みやすい条件を自動的に選んで効率的にユーザーを確認できるという。
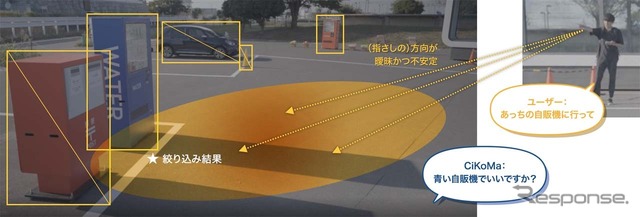
また、ジェスチャーや周辺環境を理解することで「あそこの自動販売機まで行って」といった曖昧な指示にも対応でき、途中で指示が変わっても臨機応変に対応できる“賢さ”も併せ持つ。特にモビリティ側から危険リスクを判断して、目的地を変更して利用者に提案するのには驚かされた。
本田技術研究所によれば、これらの技術は常総市での技術実証を繰り返しながら経験を積み重ね、2030年頃の実用化を目指す。そして、最終的にはこの実験を2050年に「すべての交通参加者を交通事故ゼロにする」というホンダが掲げる目標に向かって進化させていく計画だ。






